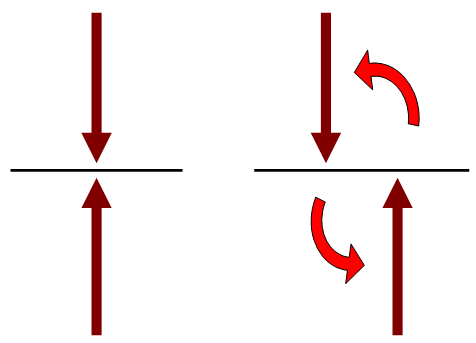
In der Statik hat jede Kraft ihre gleichgroße Gegenkraft, welche die selbe Wirkungslinie hat. Die Gegenkraft läuft jedoch in entgegengesetzter Richtung und sorgt daher für ein Kräftegleichgewicht.
Kraft ->Körper<- Gegenkraft
Wirkt eine Kraft und eine Gegenkraft auf einen Körper ein, herrscht ein Kräftegleichgewicht, der Körper wird daher nicht beschleunigt, er befindet sich in Ruhe.
Ein Beispiel:
Stellen wir uns auf dem Boden, zieht uns die Gravitationskraft zum Erdmittelpunkt. Diese Gravitationskraft (Kraft) wirken wir mit unserer Muskulatur (Gegenkraft) entgegen. Entspannen wir unsere Muskulatur, zum Beispiel durch eine Betäubung, fallen wir auf dem Boden. Dennoch haben wir zumindest den Boden, der uns abhält, zum Erdmittelpunkt gezogen zu werden, da der Boden (und unser eigener Körper) eine eigene Statik hat und genug Widerstand bietet, der Kraft entgegenzuwirken.
Dabei wird in der Statik erst einmal davon ausgegangen, dass jeder Körper ein starrer Körper ist. Tatsächlich ist aber selbst das härteste Material nicht absolut starr.
Beispiel:
Eine Kartoffel kann man mit dem Daumen der einen Hand anschieben, nimmt man den Daumen der anderen Hand hinzu und drückt die Kartoffel (auf der selben Wirkungslinie) in entgegengesetzter Richtung mit gleicher Kraft, wird die Kartoffel nicht verschoben. Steigen die Kräfte, die beide Daumen ausüben, synchron an, ändert sich nichts an der Position der Kartoffel, sie wird sich jedoch verformen.
Setzt die entgegenwirkende Kraft nicht auf der selben Wirkungslinie an, wird sich der Körper, wenn er nicht durch eine andere Kraft fixiert ist, um eine eigene Achse drehen – daraus folgt dann ein Moment.