Vorliegend ein Rollbalken, welcher in einem bestimmten Winkeln an eine Wand angelehnt ist. Der Balken hat an beiden Seiten je eine Rolle, es gibt daher wenig Widerstand an den Kontaktpunkten zwischen Balken, Wand und Boden (und in diesem Beispiel gehen wir dazu davon aus, dass es gar keinen inneren Widerstand in den Rollen gibt). Der Rollbalken befindet sich in Ruhezustand, er bewegt sich nicht und soll sich nicht bewegen.
Es wirken Kräfte auf Balken und die kontaktierte Umgebung, dabei sind hier die Kräfte interessant, die auf die Rollen wirken. Dazu wird ein sogenannter Freischnitt vorgenommen. Der Freischnitt zeigt die wesentlichen Objekte (hier der Rollbalken) und die wirkenden Kräfte und Momente.
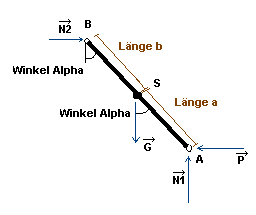
Der Freischnitt zeigt die Länge des Balkens (Längen a+b) und die Punkte A und B an den Enden des Rollbalkens. Der Punkt S bezeichnet den Schwerpunkt. Auf die untere Rolle wirken eine Normalkraft N1 und eine horizontal gegenwirkende Kraft P. Der oberen Rolle wirkt hingegen nur eine Kraft von der Wand ausgehend der Rolle entgegen, hier die Normalkraft N2. Vertikal wirkt die Gewichtskraft G vom Schwerpunkt aus. Zudem haben wir einen bestimmten Winkel, nach dem der Rollbalken ausgerichtet ist. Dieser Winkel lässt sich über den Balken spiegeln, wie die folgende Skizze zeigt.
Richten wir ein kartesisches X-Y-Koordinatensystem auf die Skizze aus, können wir die Kräfte in X- und Y-Richtung summieren. Die Summe aller Kräfte muss dabei Null sein, da sich das Objekt in Ruhezustand befindet und sich die Kräfte daher gegenseitig aufheben. Bei der Summierung ist auf die Vorzeichen zu achten, Kräfte in negativer Richtung sind zu subtrahieren. Momente, die im Uhrzeigersinn wirken, sind ebenfalls negativ und daher zu subtrahieren.
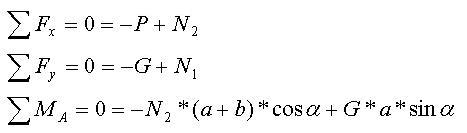
Das Moment am Punkt A (man hätte auch das Moment an Punkt B wählen können, hätte dann jedoch eine Kraft mehr berücksichtigen müssen) stellt sich zusammen aus der Kraft N2, welche den senkrecht zu N2 stehenden Hebel (a+b)*cos(Winkel-Alpha) hat, sowie der Kraft G und dem Hebel a*sin(Winkel-Alpha). Die Summe der Produkte aus Kraft und Hebel ergibt das Moment.
Die Kräfte N1, N2 und P können nun durch Umstellung gelöst werden.